Под водой железный кит днем и ночью он не спит потому что охраняет наш покой - это ПОДВОДНАЯ ЛОДКА . Подводные лодки постоянно находятся на боевом дежурстве в разных точках мирового океана. Лодки как обычно находятся в автономном плавании и оснащены боевыми средствами для защиты от любых средств нападения на них. Первые подводные лодки были не большие и могли пробираться по малым глубинам, но не могли продолжительное время находиться под водой, требовалось всплывать на поверхность и заряжать аккумуляторные батареи. В этом случае лодки становятся уязвимые. Оснащение ядерными энергетическими установками позволяют находиться в подводном состоянии по году. Только человеческий фактор требует всплытия - замена экипажа или пополнения продовольствия.
Да, является.
Поступательное движение - не обязательно движение по прямой. Когда тело движется по окружности не вращаясь (перемещение идёт "параллельно самому себе"), то движение всё равно поступательное. Ведь ориентация педалей относительно неподвижной системы координат не изменяется - а это и есть признак поступательного движения.
В случае если аэростат находится в неподвижном состоянии и не привязан. Если человек вылезет из гондолы и начнет подниматься в верх по тросу. Если в учет брать мелкие величины. При поднятии на верх изменяется атмосферное давление и на человека воздействует меньшее количество воздуха и теоретически он становится легче. Если не брать в учет что с подъемом изменится температура воздуха. В этом случае аэростат сдвинется вверх. В этом случае.
- Сам аэростат станет тоже станет легче.
- На его оболочку будет меньше воздействия воздуха.
- Если оболочка не жесткая при неизменном объеме газов она расширится.
- Увеличится подъемная сила
- Начнется подъем вверх.
Теоретически космонавт может вернуться если бросит в противоположную от корабля сторону какой-то предмет, но здесь есть ограничения импульс, полученный от предмета должен сообщить скорость большую чем скорость удаления от корабля, бросок должен быть точно от центра тяжести космонавта иначе вместо поступательного движения он приобретет вращательное. Если бросить нечего, то можно рискнуть проделав отверстие в скафандре и за счет реактивной тяги выходящего воздуха приобрети нужную скорость, но ограничения все те же, плюс воздуха должно хватить и на движение и на дыхание. После набора нужной скорости отверстие нужно заткнуть.
Других вариантов при отсутствии движителя я не вижу
Тут, к сожалению, не проканает использование формула последовательногои параллельного сопротивления, поэтому придётся честно решать через законы Кирхгофа.
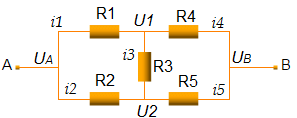
Для начала малость перерисуем схему:
Ну и теперь, памятую законы Ома и Кирхгофа, пишем:
i1+i2 = i4+i5 (на будущее - эта сумма как раз и есть ток, который нам и надо найти)
i2+i3 = i5
i1*R1 = U1-UA
i2*R2 = U2-UA
i3*R3 = U2-U1
i4*R4 = UB-U1
i5*R5 = UB-U2
Тут 7 уравнений на 9 неизвестных - пять токов и четыре напряжения. Но штука в том, что напряжения UA, UB можно выбрать произвольно. Например, считать UA=1, UB=0. Тем самым число неизвестных снижается до числа уравнений, и система оказывается вполне себе разрешимой.
Решать её, уж не обессудьте, придётся самостоятельно, благо это не составит труда. После чего остаётся найти сумму i1+i2 - вместе с разностью напряжений между точками А и В это как раз и даст эквивалентное сопротивление вспей цепи.